Robotique
Base mobile robotique — Hackathon IUT Cachan
Une base mobile robotique pédagogique conçue de A à Z avec mon équipe à l'IUT de Cachan : carte mère sur-mesure, sept types de capteurs et asservissement PID, destinée aux TP et à la coupe de robotique GEII.
Le projet
Projet de fin de cycle à l'IUT de Cachan, dans la continuité de notre année : concevoir un robot mobile complet qui servirait d'outil pédagogique aux étudiants suivants (travaux pratiques et coupe de robotique GEII). On a commencé par de la rétro-ingénierie d'un robot existant pour le comprendre à fond — électronique, mécanique, programmation — avant de le refaire et de l'améliorer. Un vrai projet d'équipe (à trois) qui m'a plongé dans le système embarqué de bout en bout.
Livrer une base mobile fiable et facile à programmer, équipée des capteurs imposés et pilotable sans fil, pour que de futurs étudiants apprennent la robotique dessus.
Sous le capot
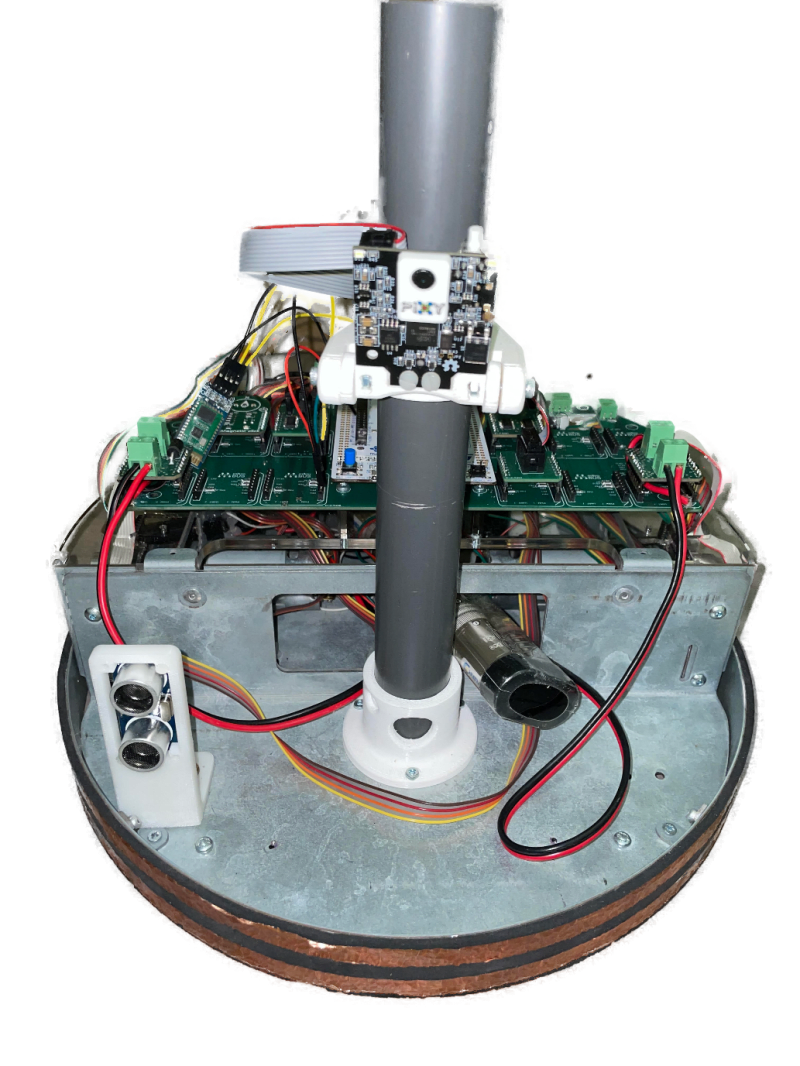
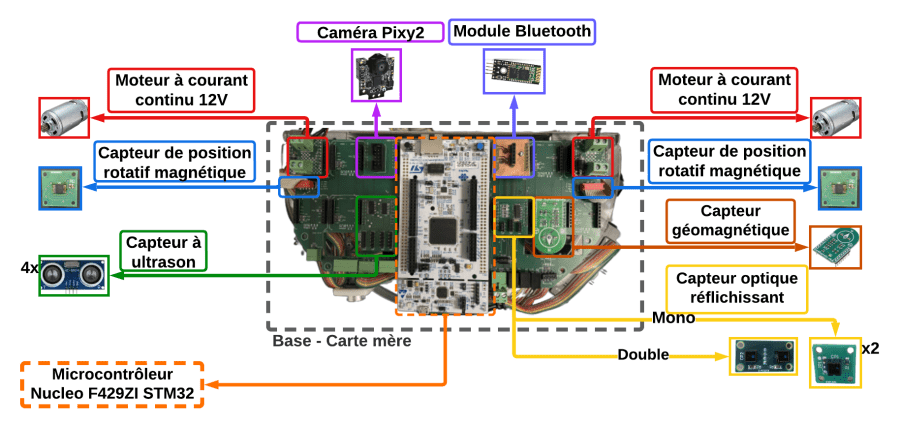
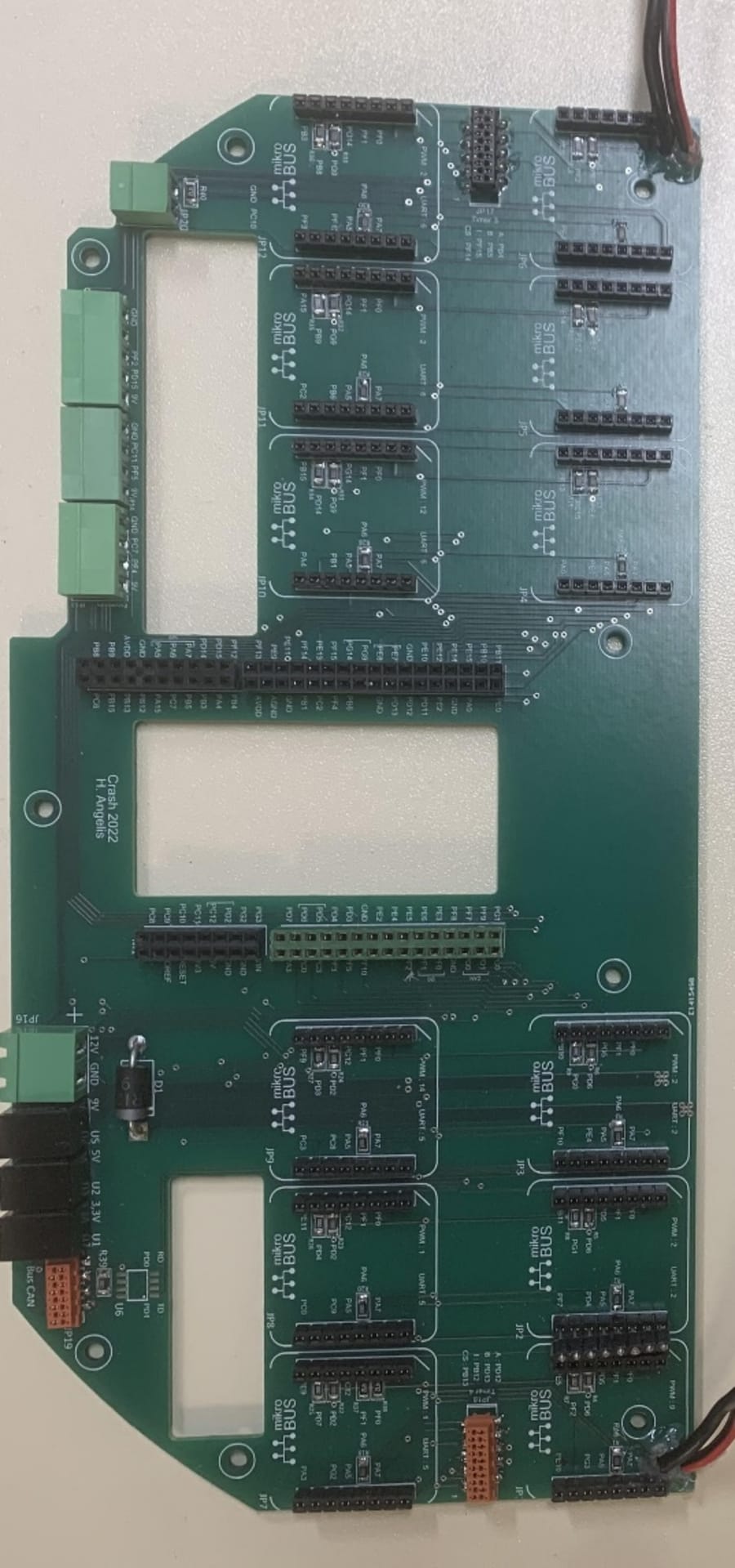
Le cœur est un Nucleo STM32 F429ZI relié à une carte mère que nous avons conçue (Altium), exposant des emplacements MikroBUS standardisés. Chaque fonction est un module : encodeurs AS5047P (SPI) pour l'odométrie, ultrasons VMA306, caméra Pixy, boussole BMM150, capteurs de ligne CNY70, et deux étages de puissance IFX9021 pour les moteurs. Le tout est programmé en C++ (mbed), avec un asservissement PID en boucle fermée sur les encodeurs et une interface Qt pour le pilotage.
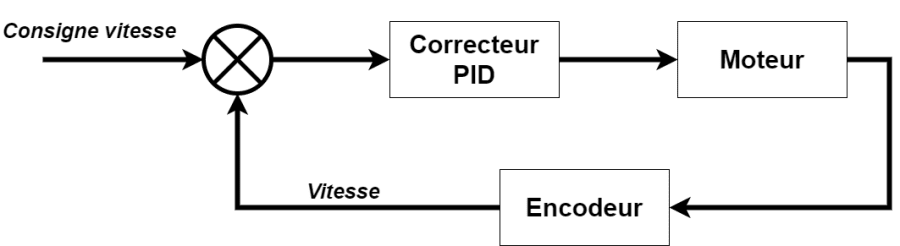
Le plus délicat a été l'asservissement : obtenir un déplacement précis a demandé de régler le correcteur PID à partir du retour vitesse des encodeurs, puis d'enchaîner avec des profils de vitesse en trapèze pour des trajectoires propres.
Résultats
Une base mobile fonctionnelle et complète — elle suit un objet, suit une ligne, évite les obstacles et se pilote sans fil — prête à servir de support de TP et pour la coupe GEII. Le projet m'a fait toucher à toute la chaîne embarquée : électronique, PCB, mécanique, firmware et asservissement, en équipe.
