Robotique
Robot suiveur de ligne — Gamel Trophy
Un robot autonome qui suit une ligne tout seul, conçu de A à Z avec mon équipe pour une compétition de robotique.

Le projet
C'était mon initiation à l'électronique embarquée et au C++, au tout début de mes études. Avec mon équipe à l'IUT, on s'est lancé un vrai défi : concevoir un robot capable de courir seul sur une piste pour une compétition. Pas de tutoriel, juste un cahier des charges, une deadline et l'envie de voir notre machine franchir la ligne d'arrivée.
Construire de zéro un robot autonome capable de suivre une piste, repérer les raccourcis et la parcourir le plus vite possible, en équipe et dans les délais imposés.

Ce que j'ai construit
- Robot qui démarre et roule en totale autonomie
- Suivi de ligne fluide, sans partir dans tous les sens
- Détection des raccourcis pour gagner du temps sur le circuit
- Carte électronique maison, conçue et fabriquée de bout en bout
- Réglage de la vitesse à la volée selon la piste
- Robot validé sur le terrain, en conditions de course réelles



Sous le capot
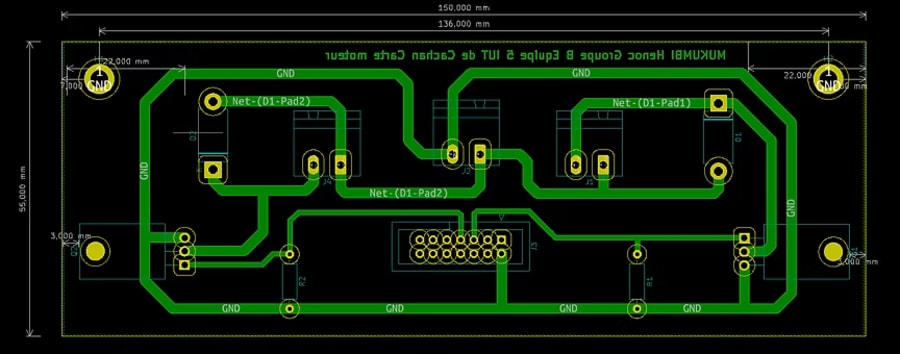
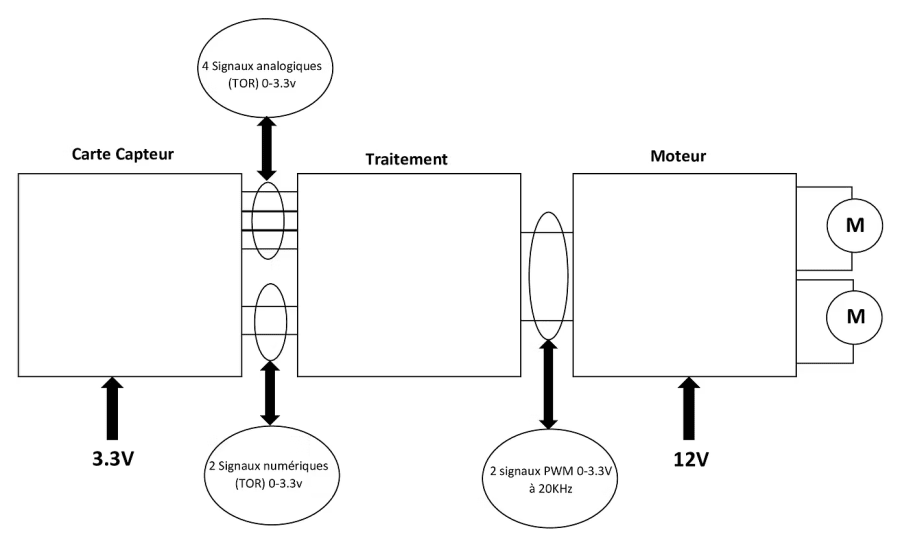
J'ai pris en charge la carte moteur de bout en bout : schéma et routage du circuit imprimé sous KiCad, gravure, soudure, puis tests au multimètre. Côté logiciel, j'ai programmé le robot en C++ : lecture des capteurs et automates d'états pour le suivi de ligne et la détection des raccourcis. Du premier croquis jusqu'au robot qui roule.


Résultats
Le robot a fonctionné et s'est qualifié en phase finale avec un chrono de 46 secondes. Au-delà du résultat, ce projet prouve que je sais mener une réalisation technique complète, du matériel au logiciel, en équipe et jusqu'au bout.


